机器人技术研究人员和工程师可以使用 MATLAB 和 Simulink 设计和优化算法,为真实系统建立模型,并自动生成代码——所有过程均在一个软件环境下完成。
MATLAB 和 Simulink 可以实现:
设计硬件平台

设计与分析三维刚体机械(如车辆平台和机械臂)和执行机构动力组件(如机电或流体系统)。您可以将 URDF 导入 Simulink,也可以从 SolidWorks 和 Onshape 等 CAD 软件中导入三维模型到 Simulink,从而直接使用现有的 CAD 文件。。运用电气、液压、气动以及其他组件建立多领域系统模型 ,并在模型中添加约束(比如摩擦)。
采集传感器数据

您可以通过 ROS 连接传感器。特定传感器(如摄像机、激光雷达和 IMU)的 ROS 信息可以转换为 MATLAB 数据类型,用于分析和可视化处理。
您可以让常见的传感器处理流程实现自动化处理,例如导入和批处理大型数据集、校准传感器、降噪、几何变换、分割和注册。
感知环境

您可以通过内置的 MATLAB 应用程序交互式执行目标检测和跟踪、运动估计、3D 点云处理和传感器融合等操作。运用深度学习进行图像分类、回归以及特征学习(使用卷积神经网络 CNN)。
自动将您的算法转换为 C/C++、定点、HDL 或 CUDA 代码。
规划和决策

通过同步定位与地图构建(SLAM),使用激光雷达传感器数据创建环境地图。
通过设计路径和运动规划算法约束环境导航。使用路径规划器,根据任意给定地图,计算避障路径。
设计算法,让您的机器人在面对不确定性时做出决策,并在协作环境中进行安全操作。使用状态机,确定决策所需的条件和行动。
设计控制系统
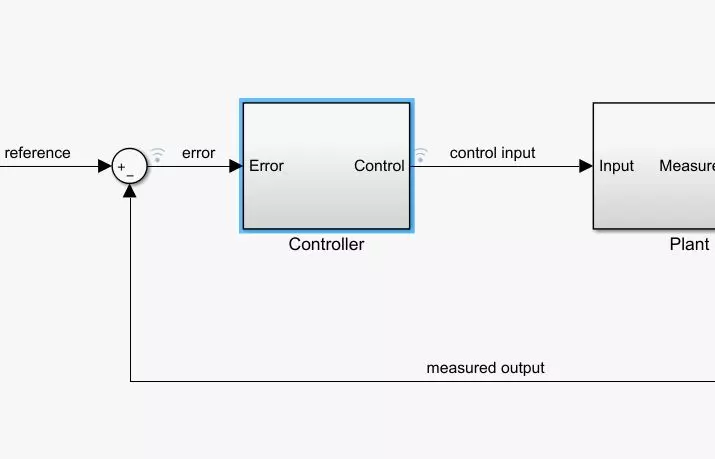
您可以使用算法和应用程序,系统地分析、设计和可视化复杂系统在时域和频域内的行为。
使用交互式技术(如波德图和根轨迹法)自动调整控制器参数。优化增益调度控制器并指定多个优化目标,例如参考信号跟踪、干扰抑制和稳定性裕度。
代码生成和需求追溯可帮助您验证系统及其合规性。
与其他平台和目标通信
使用 CAN、EtherCAT 和 802.11 等协议与嵌入式目标通信。使用数字、射频和其他无线技术 ,连接到支持 TCP/IP、UDP、I2C、SPI、MODBUS 以及 Bluetooth(蓝牙)等串行协议的硬件。
文章来源:MATLAB