概览
调频连续波(FMCW)光雷达的原型验证和测试面临着许多挑战。接下来让我们一起探讨,对这些挑战进行分解,使其变得可管理且可付诸行动,并学习有关如何逐步克服组件级到系统级测试挑战的实用指南。
引言
说到自动驾驶,问题并不是能否实现,而是在于何时以何种方式实现。 尽管业界普遍认为激光雷达是能够推动自动驾驶发展的技术之一,但它在实现规模化生产方面面临着很大的障碍。新的激光雷达设计提供了低成本、低功耗、易于制造的成像技术;但是,它们并未进行验证,也尚未商业化。不过这些问题是有望攻克的。 FMCW激光雷达为汽车制造商提供了一种可行的自动驾驶传感器技术。但这是一项全新的技术,面临着未知的开发和验证挑战。 我们先一下相邻行业如何利用汲取的经验教训来克服激光雷达发展中存在的问题。
半导体市场已经找到以较低成本量产调制激光器和接收激光链路的方法。 国防和航空航天工业也已经建立了大通道数的高带宽系统原型,且可满足不断变化的需求。 而汽车行业也通过对其现有的汽车产品进行FMCW雷达测试来为FMCW激光雷达测试铺路。
接下来我们再深入探讨一下如何借鉴其他行业的策略和最佳工程实践,将这一新技术应用到汽车行业。

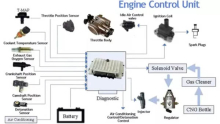
图1.FMCW激光雷达架构
FMCW激光雷达原型验证
FMCW激光雷达系统的组建和开发极具挑战性:它需要多个完美同步且经过调制的激光源,以及至少同样数量的A/D转换器,才能通过复杂的算法处理大量数据,所有这些都旨在为自动驾驶系统提供了3D视图,该视图由许多用颜色标记的小点组成,同时能够显示车速。 且先不考虑激光雷达的测试,我们来看看工程师是如何建立激光雷达原型的。
一种方法是将FMCW系统分解为电域子系统和光域子系统两部分,然后进行原型验证。
电域子系统的原型验证
电域子系统由发射端的FMCW线性调频脉冲和接收端的高带宽模数转换器组成。两者中最复杂的是接收链,因为这需要将接收到的FMCW波剥离开,并与参考信号进行比较,只有这样,才能产生结果的点云。
通常,发射端使用高度同步的多通道任意波形发生器,其通道数量要求最多可超过32个(并进行完整的发射系统原型验证)。 您可能只需要生成线性调频信号本身(通常小于100 MHz),或者可能需要生成调制波形(可能超过3 GHz)。 在接收链上,高度同步的高带宽多通道数字化仪直接连接到FPGA,您可以在其中快速重复地对其信号处理进行原型验证。 这些FPGA很多时候需要板载进行许多数字信号处理器和快速傅里叶变换,因此需要相互通信以了解彼此时序和相对位置。 只有这样,它们才能将结果发送回上位机以生成4D点云。
由于这些原型验证系统可能非常麻烦,所以理想的技术合作伙伴应可以将所有这些要求集成到单个模块化FMCW激光雷达平台中,从而帮助您节省时间和金钱。

图2.NI FlexRIO IF收发器将高速数据转换器与Xilinx FPGA相结合,适用于激光雷达测试等需要实时信号处理和高性能模拟输入的应用。
光域子系统的原型验证
光域子系统需要的仪器比电域多几种,具体取决于激光雷达制造商使用哪种类型的激光源、光电探测器和扫描(成像)方法。
几乎所有的FMCW激光雷达光学原型都使用相干激光源,并将电域子系统转换为光域子系统,然后将其与光学器件混合。 很多时候,我们使用电光转换器(E2O)将电信号转换为光信号,然后在接收链使用光电转换器(O2E)将光信号转换回电信号。 这可能需要将一个连续波激光源光学叠加到电信号上。
PXI的优势之一是该平台适用于光学原型验证和测试系统,因而可以与我们刚才讨论的电气系统相辅相成。 例如,Coherent Solutions生产的光学PXI模块可以与电域设备(通常在同一个同步系统中)结合使用,以构成完整的原型验证平台。

图3.光电PXI系统
此外,您还需要解决电源、模拟和数字控制与测量以及数据流等需求,才能建立完整的FMCW激光雷达原型。NI等公司提供了小尺寸的模块化仪器,可方便地在单个系统中管理这些组件。
芯片级组件验证方法
在开发阶段,需要通过一些验证和确认测试,来确保FMCW激光雷达能够提供预期的功能。 激光雷达测试要求通常分为芯片级、模块级和系统级。
与原型验证系统一样,首先需要分别测试电域和光域。 这需要验证每个组件的芯片和专用集成电路。 以下是芯片级组件验证方法的仪器清单:
电域
发射端和接收端(TIA、CDR、IC驱动)
光域
发射端(激光、调制器、扫描仪)
接收端(光电探测器)
测试光学芯片的一个主要挑战是光学器件与测量设备的对准。 PI-USA等多家公司都凭借其光学校准技术专门研究此功能。
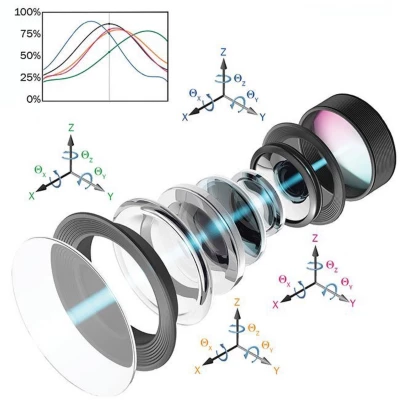
图 4. PI USA平行光学对准(图片由PI USA提供)
模块级FMCW激光雷达测试
将多块芯片集成到一个模块中时,可以汇总各个芯片的组件级测试结果。 尽管我们先前讨论的所有测试均适用于模块级测试,但测试的是整个模块的KPI,并未细分到各个组件的关键性能指标(KPI)。
如果要将设备级和模块级测试结果从实验室转移到生产车间,高效的做法当然是复用实验室的验证硬件和测试软件。 我们讨论的许多测试过程,包括晶圆级测试或生产-模块级测试,都广泛应用到离岸装配和测试公司或合同制造商的生产环境中。 而且由于优化单元测试成本可以将测试仪成本、测试时间和占地面积最小化,因此您将再次受益于与像NI这样的公司合作,因为NI可以将台式测试设备复用到生产测试仪中,并利用PXI来缩短测试时间。

图5. 从特性分析到生产均适用的通用平台
系统级FMCW激光雷达测试
至此,所有激光雷达硬件和软件都组合在一起进行系统级测试。 理想的系统级测试会将完整的FMCW激光雷达放到一个小室内,并以光学方式模拟真实世界的远程环境,从而诱骗激光雷达建立一个模拟该真实环境的点云。 在本文撰写之时,市场上并未出现低成本的商用FMCW全点云仿真方法。
但是,我们可以光学模拟对象和目标,这对于验证光学器件和算法以及执行校准以及生产测试过程极为有用。NI合作伙伴(比如Konrad Technologies、Dvin Technologies和Averna)致力于提供激光雷达对象仿真和环境仿真解决方案。
我们还可以将信号以数字方式注入光学器件后面,以使激光雷达系统认为它看到了完整的点云。
由于没有理想的系统级验证,因此大多数工程师只能依赖于现场测试。 他们在室内或室外放置已知对象及其特征,以便激光雷达系统成像。 然后根据实际情况验证激光雷达的性能,并判定系统合格/不合格。 尽管许多公司目前采用该方法来进行激光雷达系统的线下生产测试,但这种方法不具备扩展性。
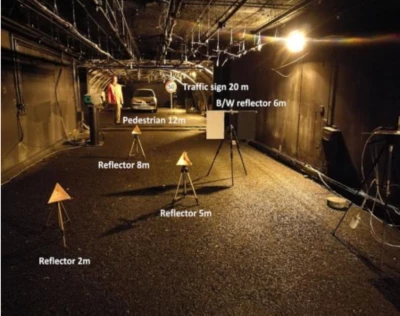
图6. 激光雷达现场测试范围
结论
激光雷达技术正在不断发展。 要使无人驾驶汽车成为现实,还有许多工作要做,FMCW激光雷达将是其中的主要贡献者。 但是基于本文讨论的挑战,显然,具有不同领域专业知识的公司需要合作,才有可能使激光雷达商业化。 让我们共同努力,针对不同的挑战制定高效的解决方案。 我们的NI ADAS/自动驾驶团队将随时待命,期待您与我们联系,共启成功之旅。