跳转到主要内容
FPGA 开发圈
Toggle navigation
新闻
视频
技术文章
博客
下载中心
活动
登录
注册
新闻
高云半导体成功举办22nm产品及方案研讨会
高云半导体展示了包括SDI、5G repeater、eDP、Ethernet、PCIE、MIPI DPHY、工业伺服(FoC+EtherCAT Slave)、E-Connect无时钟LVDS传输等多项完整解决方案。
2024-04-25 |
高云半导体
,
FPGA
莱迪思在2024嵌入式世界大会上展示先进的可编程方案
每年,全球嵌入式技术生态系统都会齐聚嵌入式世界展会,我们很高兴与大家分享莱迪思今年发布和展示的最新、先进的可编程解决方案。
2024-04-25 |
莱迪思半导体
,
2024嵌入式世界大会
,
FPGA
人工智能算力向边缘侧迁移,将带动中国边缘服务器稳步增长
2023年中国边缘计算服务器市场继续保持稳步上升,同比增长29.1%。IDC预测,到2028年,整体中国边缘计算服务器市场规模将达到132亿美元。
2024-04-25 |
人工智能
,
服务器
,
IDC
西门子发布 Veloce CS,解锁三款新品助推硬件加速仿真和原型验证
Veloce CS 可在所有平台复用,实现无缝迁移,将系统工作负载的执行和调试速度加快 10 倍
2024-04-24 |
西门子
,
Versal-Premium
,
VP1902
,
Crystal
,
Veloce-CS
高云半导体与越南孙德胜大学电气与电子工程学院开展交流合作
在交流会上,阮仲文先生详细介绍了高云半导体的发展历程、产品应用以及22纳米产品的最新情况和未来产品路线图。
2024-04-24 |
高云半导体
,
越南孙德胜大学
AMD GPU,将开源
AMD 表示,它有望在 5 月底发布其微引擎调度程序 (MES) 文档,随后发布源代码。然后,它将继续以开源方式发布 Radeon 堆栈的其他部分
2024-04-23 |
AMD
,
GPU
AMD加持研华AIMB-723工业级主板,着眼未来AOI应用
本文将讨论Advantech如何帮助客户利用AOI生产PCB和IC。重点介绍研华的由AMD驱动的AIMB-723工业级主板的新能力
2024-04-22 |
AMD
,
AIMB-723
,
AOI
,
研华科技
谁是Chiplet的最优解?
半导体行业正在准备从基于专有小芯片的系统向更加开放的小芯片生态系统迁移
2024-04-22 |
Chiplet
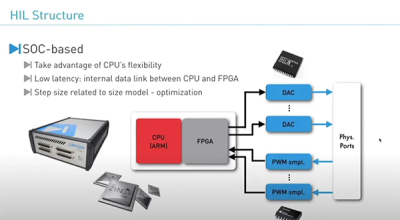
瑞苏盈科FPGA核心板在实时仿真与测试(HIL)中的应用
RT Box 1中使用的Mercury ZX5采用AMD Xilinx® Zynq® 7015/7030 SoC器件,配备ARM®双核Cortex™-A9处理器
2024-04-19 |
瑞苏盈科
,
FPGA
,
硬件在环测试
,
Plexim
走进北汽研究总院,芯驿电子 AUMO 亮相创新技术展
AUMO展示了多款智驾仿真测试、电子后视镜CMS产品及解决方案,包括自动驾驶硬件在环仿真HIL、12通道HDMI视频注入系统
2024-04-19 |
芯驿电子
,
AUMO
FPGA,被RISC-V完全征服
不知不觉中,FPGA 的 MCU 市场已经成为 100% 基于 RISC-V 的市场,我们也在逐步进入应用处理器市场
2024-04-18 |
FPGA
,
RISC-V
第二代 AMD Versal™ 自适应 SoC 助力 AI 驱动型嵌入式系统实现单芯片智能性
AMD 第二代 Versal AI Edge 系列和第二代 Versal Prime 系列自适应 SoC 为 AI 驱动和经典的嵌入式系统提供了单芯片智能性实现性能
2024-04-18 |
AMD
,
Versal
,
AI
,
每日头条
AMD 面向工业 AI 推出搭载集成 NPU 的锐龙嵌入式 8000 系列处理器
AMD 锐龙嵌入式 8000 系列处理器采用下一代 AMD “Zen 4” 4 纳米核心 CPU 架构,能提供多至 8 核心(16 线程)的强大 x86 CPU 算力
2024-04-18 |
AMD
,
AI
,
NPU
,
锐龙处理器
英特尔和Altera联合发布新芯片和FPGA以增强网络边缘AI
英特尔及其子公司Altera近日推出了一系列新的处理器,以及旨在将AI功能扩展到网络边缘的FPGA产品
2024-04-17 |
Altera
,
FPGA
,
AI
,
Agilex-5
AMD 联合 Vindral 推出全球首个超低延迟 8K 10bit HDR 直播演示
AMD 与 Vindral 合作,在拉斯维加斯的 NAB 展会上展示了全球首个具有超低延迟的 8K 10bit HDR 直播解决方案
2024-04-17 |
AMD
,
Vindral
,
Alveo-MA35D
,
8K
1
2
3
…
下一页
末页