跳转到主要内容
FPGA 开发圈
Toggle navigation
新闻
视频
技术文章
博客
下载中心
活动
登录
注册
新闻
FPGA,被RISC-V完全征服
不知不觉中,FPGA 的 MCU 市场已经成为 100% 基于 RISC-V 的市场,我们也在逐步进入应用处理器市场
2024-04-18 |
FPGA
,
RISC-V
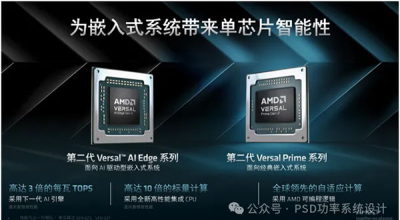
第二代 AMD Versal™ 自适应 SoC 助力 AI 驱动型嵌入式系统实现单芯片智能性
AMD 第二代 Versal AI Edge 系列和第二代 Versal Prime 系列自适应 SoC 为 AI 驱动和经典的嵌入式系统提供了单芯片智能性实现性能
2024-04-18 |
AMD
,
Versal
,
AI
,
每日头条
AMD 面向工业 AI 推出搭载集成 NPU 的锐龙嵌入式 8000 系列处理器
AMD 锐龙嵌入式 8000 系列处理器采用下一代 AMD “Zen 4” 4 纳米核心 CPU 架构,能提供多至 8 核心(16 线程)的强大 x86 CPU 算力
2024-04-18 |
AMD
,
AI
,
NPU
,
锐龙处理器
英特尔和Altera联合发布新芯片和FPGA以增强网络边缘AI
英特尔及其子公司Altera近日推出了一系列新的处理器,以及旨在将AI功能扩展到网络边缘的FPGA产品
2024-04-17 |
Altera
,
FPGA
,
AI
,
Agilex-5
AMD 联合 Vindral 推出全球首个超低延迟 8K 10bit HDR 直播演示
AMD 与 Vindral 合作,在拉斯维加斯的 NAB 展会上展示了全球首个具有超低延迟的 8K 10bit HDR 直播解决方案
2024-04-17 |
AMD
,
Vindral
,
Alveo-MA35D
,
8K
莱迪思助力汽车和工业应用实现功能安全
加强与NewTec的合作,专注于提供灵活、可扩展和易于实施的功能安全解决方案
2024-04-17 |
莱迪思
,
FPGA
,
NewTec
高云半导体再登德国纽伦堡国际嵌入式展EW2024
在本次展会上,高云展示了 Arora-V 系列高密度、高性能和低功耗 FPGA。该系列基于高度优化的 TSMC 22nm 工艺,提供了最低的功耗和最好的性能。
2024-04-16 |
高云半导体
,
EW2024
,
Arora-V
,
FPGA
Microchip收购Neuronix AI Labs
Microchip宣布收购 Neuronix AI Labs,以进一步增强在现场可编程门阵列(FPGA)上部署高能效人工智能边缘解决方案的能力。
2024-04-16 |
Microchip
,
Neuronix
,
人工智能
,
PolarFire
全国高校教师能力培养高级研讨会暨国产FPGA技术师资培训在成都顺利举办
本次会议旨在搭建一个电子信息类一流专业建设、新质课程建设的交流平台,以及通过深入研讨和交流,进一步推动电子信息类专业的高质量发展
2024-04-16 |
FPGA
,
师资培训
,
高云半导体
AMD向AI边缘计算开战,单芯片智能为嵌入式系统而生
继第一代Versal™ AI Edge自适应SoC之后,AMD又发布了第二代Versal™自适应SoC,为边缘计算打开了方便之门
2024-04-15 |
AMD
,
AI
,
边缘计算
,
Versal
Achronix FPGA增加对Bluespec提供的基于Linux的RISC-V软处理器的支持,以实现可扩展数据处理
Bluespec支持加速器功能的RISC-V处理器将Achronix的FPGA转化为可编程SoC
2024-04-15 |
Achronix
,
Bluespec
,
RISC-V
,
Speedster7t
莱迪思发布先进的运动控制解决方案
莱迪思半导体近日宣布推出一款全新的运动控制参考平台,可以加速开发灵活、高效的闭环电机控制设计
2024-04-12 |
莱迪思
,
运动控制
,
电机控制
采用AMD 3D V-Cache技术的 EPYC 9004系列处理器,为技术计算赋能
采用AMD 3D V-Cache技术的 EPYC 9004系列处理器每路最多可配备 96 个“Zen 4”核心和 1152 MB L3 高速缓存,可以更快的为CPU提供复杂的数据集
2024-04-12 |
AMD
,
EPYC9004
AMD新一代GPU MIX350年底推出 升级4nm、HBM3E
AMD计划在今年底推出升级版的HPC/AI GPU加速器“Instinct MI350”,重点升级制造工艺和高带宽内存,竞争NVIDIA B200系列。
2024-04-11 |
AMD
,
MIX350
,
GPU
,
HBM3E
5G部署带来挑战,ORAN小基站成半导体新“沃土”
根据小基站论坛(SCF)发布的市场调研报告,到2027年,全球小基站的累计部署量将接近3600万个,五年内(2022-2027)复合增长率为15%。
2024-04-11 |
5G
,
ORAN
,
莱迪思
1
2
3
…
下一页
末页