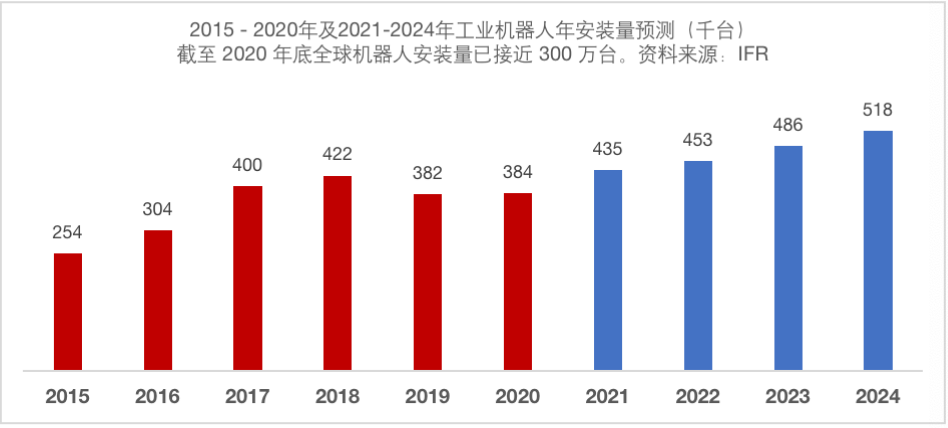
市场对机器人的需求一直在迅猛增长。研究机构 Statista 举例表明,到 2028 年,全球工业机器人市场将从 2021 年的 810 亿美元倍增到超过 1,650 亿美元。目前,建造机器人所需技术不但安全可靠,而且能够与人类并肩运行。不过,让这些技术协作运行是一项艰巨的任务。更为棘手的是,还需要融合人工智能,这使得满足计算需求变得更为困难。为了跟上当今快速的创新步伐,机器人专家转而求助于自适应计算平台。它们能够在模块化平台(可面向未来需求进行扩展)上实现时延更低的确定性多轴控制,而且内置功能安全与信息安全功能。
本电子书将从当今机器人技术的常见挑战开始向您详细讲述何为机器人?以及目前所存在的设计挑战是什么?并展望未来机器人技术,以及在引入自适应计算技术之后,机器人技术的发展和基于 ROS 2操作系统的硬件加速方案。
当今机器人技术与常见设计挑战
机器人是设计用于执行特定任务的复合系统。它是软硬件的终极组合。机器人专家采用网络、传感器、致动器与计算资源的组合创建旨在简化人类生活的精密机器。按照尺寸和用途可以分为:空中机器人、AGV/AMR机器人、协作机器人、人形机器人、工业/直角坐标机器人、手术机器人等。
当今的众多专业工业与医疗机器人都配备了两种用于驱动其行为的主要技术:CPU 用于管理形成计算图的复杂数据与控制架构,以及基于 FPGA 的自适应 SoC,用于获取信号、对信号进行实时处理并将信号传输到 CPU 进行进一步处理。但是,大量计算性能依赖 CPU,其可以处理来自传感器与机械致动器的多个请求。但是,随着计算图复杂性的增加与类型的增多,CPU 即时响应时间关键型事件所面临的难度也会提高。此时,效率会开始下降,最终随着 CPU 时延增加而导致机器人性能降低。而引入自适应 SoC 则可以帮助卸载时间敏感型计算负载、加速硬件中的部分计算功能从而恢复计算与响应时间之间的平衡,以及降低并行执行计算的总功耗。另外,ASIC 等其他技术确实可以改善响应时间和缓解计算负载,但是机器人系统的特定特性要求具备现场硬件适应性,以应对不同的环境条件并提高网络攻击抵抗能力,而这不是一次软件升级所能做到的。
自适应计算技术的引入与面向机器人的自适应SOM
机器人的未来会在边缘需要更多 AI 处理。多传感器分析与机器学习应用(包括预测性维护与故障检测)会采用 AI 在本地做出即时决策,而无需依赖基于云的传感器数据处理。另一个趋势是 5G 无线技术与时间敏感网络 (TSN) 的交汇。5G TSN 子系统可以通过促进机器人系统之间的连接而推动低时延、确定性时间敏感型工业与汽车应用的融合。关键应用包括工厂自动化、智能能源、交通运输、ADAS 与车载信息娱乐系统。
自适应计算将多核 CPU(以高度优化的实时处理器及应用处理器集群组织而成)等功能模块与可编程逻辑、网格处理器及智能引擎结合在一起,从而在最理想的架构中实现了机器人工作负载的分配。如此强大的算力辅以功能安全能力,为机器人带来了更加安全可靠的运行优势,有助于避免数据泄露(降低机器人完整性并使其易受攻击)。机器人是控制路径与数据路径的混合体,它们通过对外部事件(如视觉或传感器刺激等)进行响应而做出动作。自适应计算使它们能够为正确的计算单元分配正确的计算负载。结合相关硬件可以实现全面的设计方案和运行时软件,也就是说能够为打造高度灵活和高效的系统提供更优化的平台。
提供强大的硬件加速支持
Kria™ KR260 机器人入门套件是继 KV260 视觉AI 套件和量产型 K26 SOM 之后,KRIA 产品系列的又一全新产品。它能够在模块化平台(可面向未来扩展)上实现时延更低的确定性多轴控制,且内置功能安全与信息安全功能,专为机器人以及工业自动化的开发人员打造以其熟悉的 ROS 2 为中心的开发体验,针对工厂、农场、医院和仓库等应用场景下的视觉、通信和控制等方面提供硬件加速的优势。与此同时,自适应 SOM 的优势并不局限于硬件。
支持熟悉的软件开发环境和框架
软件开发者也可以利用面向自适应 SoC 的预置配置(如添加人脸识别算法)来加快设计周期。自适应 SOM 可以提供完整的固件基础架构,以便采用 Python、C++ 等大家熟知的软件开发语言以及 TensorFlow、PyTorch 等深度学习框架,通过简单的现成加速通道运行机器人应用。
KRS 让ROS 2开发更加简单高效
来自 Open Robotics 的机器人操作系统 (ROS) 已经成为面向机器人应用的行业标准软件开发平台。ROS 包括用于开发机器人应用的开源软件库(如用于运动规划与控制)与工具(如仿真、测试、调试),因此吸引日益增多的机器人专家为其开发与支持提供助力。
但是,在 ROS 工作流程中集成自适应计算的大多数尝试都是从硬件工程师的角度出发的。而大部分机器人专家并非熟悉嵌入式流程与硬件流程的专家。所以,在将自适应计算直接集成到 ROS 生态系统之后可以为机器人专家提供其熟悉的用户体验。
KRS (Kria 机器人堆栈)是一组集成的机器人库和实用程序,它们使用硬件来加速工业级机器人解决方案的开发、维护和商业化。它采用 ROS 2 软件开发套件 (SDK),可实现以 ROS 2 为中心的开发方法,该方法从创建计算图形到为应用商店提供的 ROS 2 覆盖工作区实现商业化。这样机器人专家就能够集中精力改进计算图,而不是努力成为硬件专家。

图:Kria 机器人协议栈工具与组件
随着 Kria KR260 机器人入门套件的发布,AMD 为AI 驱动机器人、机器视觉以及工业通信与控制等应用提供了开箱即用的开发平台,助力实现高性能、低时延与更快速的部署。