作者:Luke Liu,来源: Comtech FPGA微信公众号
1. 很容易认混的LiDAR 和 RADAR
在说到基于FPGA的LiDAR系统之前,我们先来聊聊”雷达”和”激光雷达”的区别。因为这两个词语看起来十分相近,经常会被读者混淆。
实际上,目前大家经常谈论的激光雷达(LiDAR),其实是“光学雷达”,从其英文“Light Detection And Ranging” (也就是”光学探测及测距”)缩写而来,是一种光学遥感技术,通过向目标照射一束光,通常是一束脉冲激光,来测量目标的距离等参数。
而我们一般说的雷达(Radar)又是什么意思呢?它的名字Radar的全称是Radio Detection And Ranging,翻译过来,是“无线电的探测和测量”。其实这两者工作原理相似,区别在于发射信号不同,Lidar采用的是激光,而Radar采用的是无线电波(如微波 / 毫米波 / 厘米波雷达)。
2. 激光雷达大家族枝繁叶茂
如上面我们提及,LiDAR是光学探测及测距系统的简称,也就是用激光器作为发射光源,采用光电探测技术手段的主动遥感设备。激光雷达是激光技术与现代光电探测技术结合的先进探测方式。由发射系统、接收系统、信息处理等部分组成。发射系统是各种形式的激光器,而接收系统采用望远镜和各种形式的光电探测器。
随着科技的不断发展,激光雷达的应用越来越广泛,在机器人、无人驾驶、无人车等领域都能看到它的身影,有需求必然会有市场,随着激光雷达需求的不断增大,激光雷达的种类也变得琳琅满目,按照使用功能、探测方式、载荷平台等激光雷达可分为不同的类型。
以离我们生活很近的车用激光雷达举例,激光雷达具有高精度、高分辨率的优势,同时具有建立周边3D模型的前景,然而其劣势在于对静止物体如隔离带的探测较弱且技术落地成本高昂。激光雷达可广泛应用于ADAS系统,例如自适应巡航控制(ACC)、前车碰撞警示(FCW)、自动紧急制动(AEB)及更高级的L4级别自动驾驶等。
当然,激光雷达也有部分缺点,它在工作时受天气和大气影响大。激光一般在晴朗的天气里衰减较小,传播距离较远。而在大雨、浓烟、浓雾等坏天气里,衰减急剧加大,传播距离大受影响。
那么,从设计上来讲,激光雷达都分为哪几类?而基于FPGA/SoC的设计为什么在激光雷达业界占据主流呢?我们为您徐徐道来。
激光雷达如何分类?
如我们在前面提及,雷达可以从两个维度进行分类[1] [3]:
从发射波来看,分为脉冲和连续波两种:基于脉冲,以ToF为主要测距原理占据了当前的主要,但是基于连续波的FMCW激光雷达也在不断涌现新品。
而我们更直观的是根据扫描方式是以扫描机制分类[1]:
以车载激光雷达为例,激光雷达通常分为机械式激光雷达、纯固态式激光雷达、半固态激光雷达。其中,半固态雷达以转镜式、旋镜式、振镜式三类为代表。而固态激光雷达主要有MEMS、OPA、Flash三大技术方向。
2.1 机械式激光雷达
机械式激光雷达的经典架构主要是通过电机带动光机结构整体旋转,一般在系统通道数目的增加、测距范围的拓展、空间角度分辨率的提高、系统集成度与可靠性的提升等方面进行技术的创新。机械式激光雷达具有扫描速度快,接受视场小,抗光干扰能力强,信噪比高等优势,缺点在于价格昂贵,光路调试、装配复杂、生产周期较长。

2.2 半固态式激光雷达
半固态式激光雷达可以分为转镜式、微振镜式等。其中,转镜式保持收发模块不动,让电机在带动转镜运动的过程中将光束反射至空间的一定范围,从而实现扫描探测,其技术创新方面与机械式激光雷达类似。

转镜式激光雷达:保持收发模块不动让电机在带动转镜运动的过程中反射激光从而达到扫描探测效果(图片来源:Valeo)
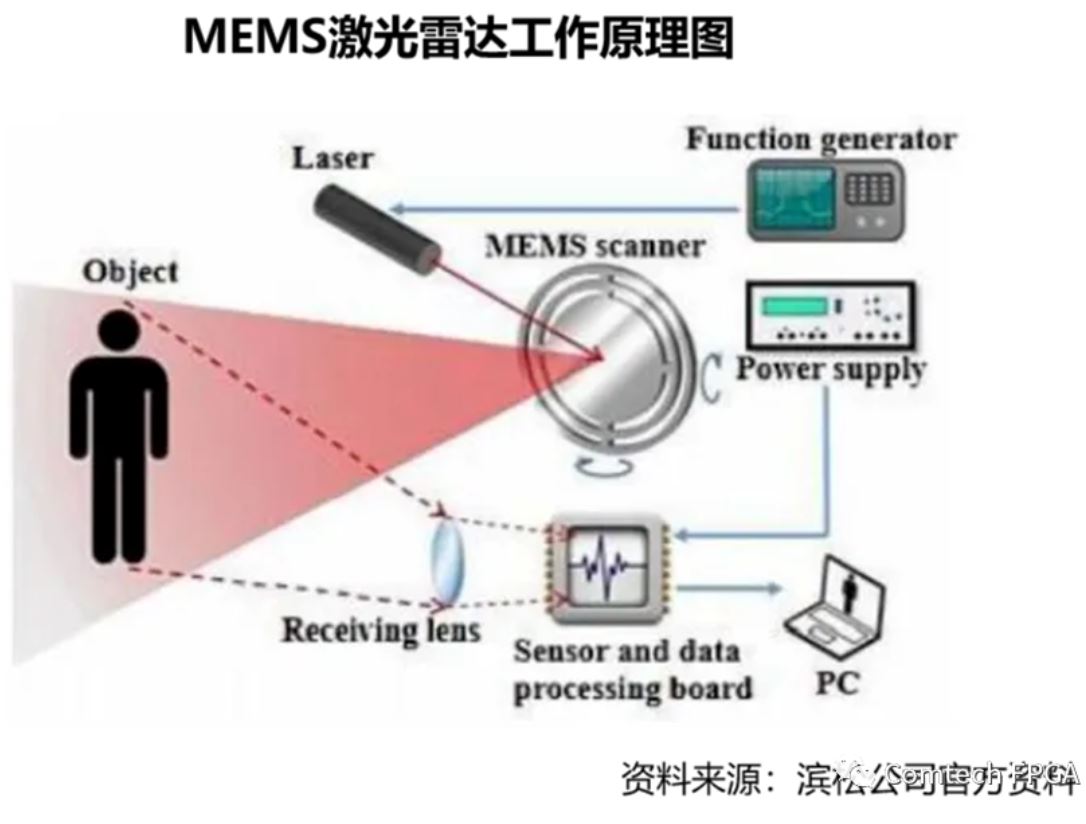
微振镜式/MEMS式激光雷达主要采用高速振动的二维振镜实现,对空间进行一定范围的扫描测量,技术发展方面侧重开发口径更大、频率更高、可靠性更好振镜来适用于激光雷达。微振镜/MEMS振动幅度很小,频率高,成本低,技术成熟,适用于量产大规模应用。
2.3 纯固态式激光雷达
一般认为,纯粹的固态激光雷达只有两种,一种是光学相控阵OPA,一种是Flash。OPA 即光学相控阵技术,通过施加电压调节每个相控单元的相位关系,利用相干原理,实现发射光束的偏转,从而完成系统对空间一定范围的扫描测量。而Flash激光雷达主要是通过短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的面阵接收器,来完成对环境周围图像的绘制。
这两种纯固态式激光雷达都有扫描速度快、精度高、可控性好、体积小等特点被认为是未来激光雷达的发展趋势,当然也有出于功率限制导致纯固态激光雷达扫描距离较短等有待改进之处。
3. 基于FPGA的激光雷达设计
激光雷达度对接口速率与算力的需求:
如前文提及,不同的形态对于激光雷达的光学设计差异非常大,从光源的选择(采用哪个波段,多少个激光器)、扫描方式选择(机械,转镜、MEMS、双楔形棱镜、OPA、Flash等)、接收方式的选择(如业界流行的APD、SiPM、SPAD等方式)都有多种方式。这意味着如果需要对信号进行有效处理,激光雷达的硬件和算法是一个软硬件紧密结合设计,是一个整体嵌入式算法系统设备。
激光雷达的算法主要包括点云生成和点云信号处理两部分:
首先是点云生成的一系列算法,由硬件以及光学设计强耦合而成,包含以下四个方面:
A. 光源生成:由 FPGA、Laser Driver 及相关算法生成,(如由FPGA 形成抗干扰编码等);
B. 光源扫描:电机、MEMS 等相关部件的扫描算法、ROI 区域形成等;
C. 光源接收:信号检测、放大、噪声滤除、近距离增强等算法;
D. 信号处理:点云生成、状态数据、消息数据生成等;
而接口速率则根据激光雷达使用TDC或ADC而不同(总体来说,TDC 方式更适合低成本场景,而ADC则支持更精密测量)。
由于反射光以及光电探测器通常输出的都是模拟信号,往往需要将其转化成数字信号才便于核心处理器进行处理及运行后续的算法。TDC(时间数字转换器)主要发挥计时器功能,通常用于低功耗、低成本、环境简单的系统,当主控芯片发出发光信号时,也同步给 TDC 一个开始计时的信号,随后反射回来的光经过 TIA 转换成放大的电压,再经过比较器与参考电压比较,判断是否有光入射,TDC则将比较器的输出当做结束信号,完成计时,并将时间信息送回主控芯片。以AMD/Xilinx器件为例,基于FPGA的进位链模块,28/16nm系列器件可以做到小于10ps的测量精度。
基于ADC的激光雷达通常用于更复杂的系统,ADC 对反射光信号进行持续采样,转换成数字信号,并由控制芯片进行波形处理、计时等工作。无论是基于高速LVDS并行接口,还是更高速率,基于高速串行收发器(Serdes,如基于JESD204B/C接口)的高速ADC, AMD/Xilinx 器件支持最高基于JESD204C 的32Gbps速率,给您带来更多实现方式的选择空间。
4. 在激光雷达大放异彩的AMD/Xilinx FPGA
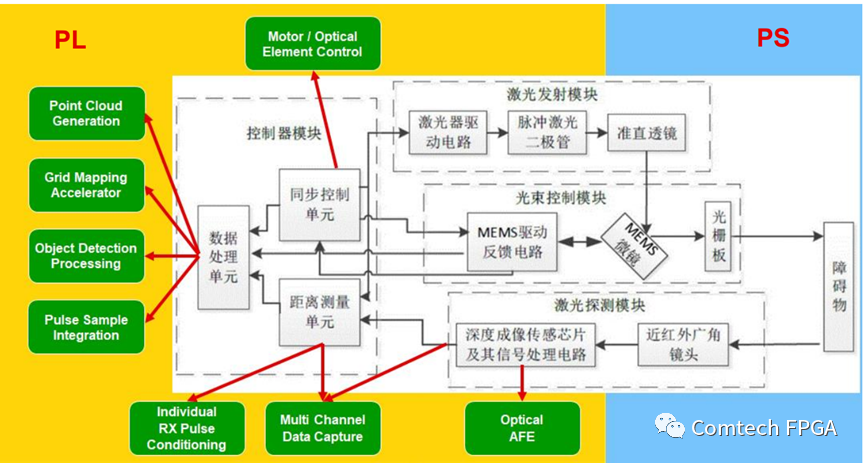
AMD/Xilinx SoC:适应算法快速迭代的高效方案
Xilinx/AMD提供了成熟的带有可编程逻辑的SoC芯片,以28nm制程的Zynq7000系列,16nm制程的MPSoC系列为主,其PL部分的可编程逻辑可以提供丰富而精准的电机控制,脉冲生成,激光发射器/接收器控制,数据同步、滤波,点云数据生成及处理,目标检测等功能的硬件及相关IP, 而PS部分的处理器则可以对流程控制,数据上传,在线升级(OTA)。
同时(敲黑板啦!) , 针对工业及车规应用,AMD / Xilinx 的相关芯片及工具链均通过了IEC-61508 / ISO 26262 认证, 可以配合全套功能安全方案,实现不同应用场景的功能安全需求,为相关激光雷达应用保驾护航!
基于上述考虑,这也是为什么在当前工业界,激光雷达的主控芯片中FPGA占据了相当大比例。为什么不采用 CPU 作为主控?因为激光雷达需要进行大量的信号处理、电机时序控制等,CPU 虽然也能做,但如果基于可编程的FPGA设计,采用专用的算法以及为算法专门优化设计的电路,其效率会高得多。
如果您正打算深入研究基于FPGA的激光雷达,打算开始一个新的设计,欢迎联系科通,我们帮您共同实现!
lukeliu@comtech.cn
simonyang@comtech.cn
charlesxu@comtech.cn
参考文献:
1. https://laser.ofweek.com/2021-01/ART-8300-2400-30480683.html 《一文看懂四种激光雷达特点及主要玩家》, OFweek激光网
2. https://baike.baidu.com/item/%E6%BF%80%E5%85%89%E9%9B%B7%E8%BE%BE/237437... 激光雷达 百度百科
3. https://baijiahao.baidu.com/s?id=1732066067947289719&wfr=spider&for=pc 《激光雷达大乱斗:才卷完数量,又开始卷布局位置了》,电动邦
4. https://mp.weixin.qq.com/s?__biz=MzU1MDYxNzE0NQ==&mid=2247554786&idx=4&s... 一文详解激光雷达的7大分类,亚洲新能源汽车网