Zynq 助力NI roboRIO 机器人设计平台
judy 在 周四, 09/15/2022 - 09:29 提交
RoboRIO 是一款基于可重配置硬件的平台,主要用于学术用途
RoboRIO 是一款基于可重配置硬件的平台,主要用于学术用途

V4L2是Video for Linux2的简称,为Linux中关于视频设备的内核驱动。在Linux中,视频设备是设备文件

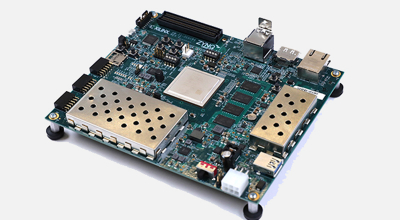
该演示简要介绍了 Kria™ 系统级模块和 KR260 机器人入门套件。

下一代 7nm 工艺 Versal 实现 4 路 2MP,2 路 8MP 30FPS 相机,1 路激光雷达,1 路毫米波雷达的数据通道处理
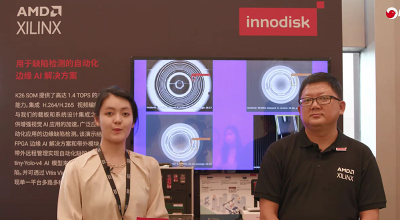
该演示结合了FPGA边缘AI解决方案和带外模块,通过带外远程管理实现自动化缺陷检测。
数字时代蓬勃发展,算力已成为重要的生产力,它像水、电一样,是当今社会的核心资源。
本文将探讨如何以 Zynq UltraScale 器件上的 IP 核为目标,使用 Python 来创建一些强大的应用和实用工具。

Demo 演示了超高清8K视频经过 HDMI2.1 接口在Xilinx 平台上的输入和输出实现

kr260已经推出,出货周期20周以上,这里给大家总结一个资料阅读路径

本 Demo 基于 Vitis™ AI 和 Vitis™ Video Analytics SDK(VVAS),对视频处理的全流程进行加速。