KR260: 硬件加速下一代 ROS 2 与机器视觉设计
judy 在 周五, 05/27/2022 - 09:39 提交
6月28日,10:00 – 11:30。AMD 工业与视觉系统架构师,翁羽翔将座客直播间与您详细介绍我们最新发布的 KR260 机器人入门开发套件。
6月28日,10:00 – 11:30。AMD 工业与视觉系统架构师,翁羽翔将座客直播间与您详细介绍我们最新发布的 KR260 机器人入门开发套件。
Ubuntu18.04安装ROS ros-melodic-desktop-full时,遇到错误“unmet dependencies. Unable to correct problems, you have held broken packages."。

根据提示,逐层安装缺失的模块,包括ros-melodic-perception, ros-melodic-perception-pcl, ros-melodic-pcl-conversions, libpcl-dev, libvtk6-dev, libvtk6-qt-dev, libvtk6-java, 一直报告同样错误。
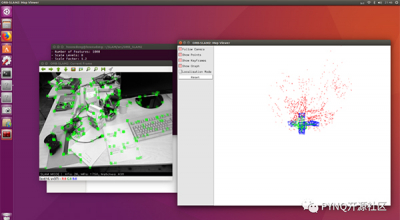
PYNQ作为一套开源框架,其一大优势是软件框架的兼容性,正如PPT中介绍的,基于PYNQ框架,我们不仅可以接入常用的Numpy, Pandas等,也可以接入机器人操作系统ROS。