作者:Chen Shaoyi,AMD工程师;来源:AMD开发者社区
上一篇博客中我们导出了platform的设计工程XXX.xsa。接下来我们将使用pfm.tcl来生成platform工程,配置Linux部分并生成Vitis acceleration platform。
使用以下命令将xsa转换为platform文件。
xsct pfm.tcl -xsa
其中pfm.tcl文件可以从 https://github.com/Xilinx/kria-vitis-platforms/tree/main/kv260/platforms... 获得。
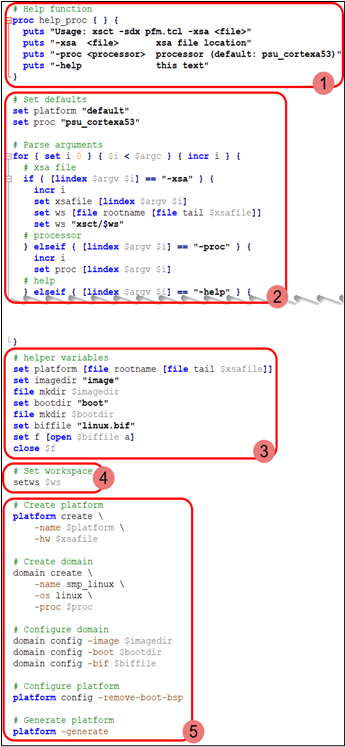
Tcl 脚本中第一部分提供了脚本的使用帮助。第二部分将平台的默认处理器设置为 psu_cortexa53。 makefile 通常调用此 Tcl 脚本,第二部分的命令解析 makefile 发送的这些参数。第三部分设置了platform、映像目录、启动目录和 BIF 文件的多个变量。第四部分设置了工作空间。第五部分创建platform项目和域并构建/生成平台。
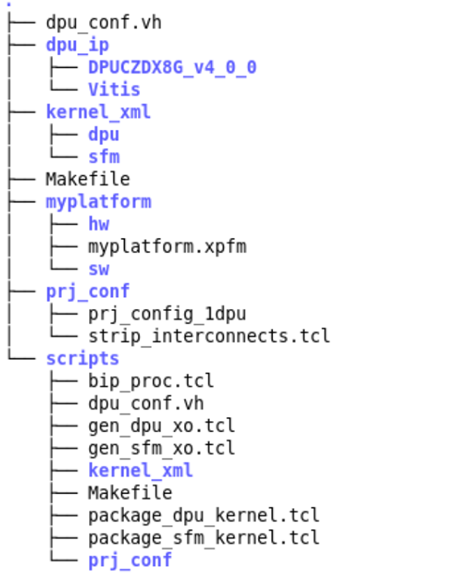
接下来我们需要把DPU.xo连接到我们刚刚生成的platform上。从https://github.com/Xilinx/kria-vitis-platforms/tree/xlnx_rel_v2022.1/kv2...复制必要的文件,组织为如下图所示的目录结构。
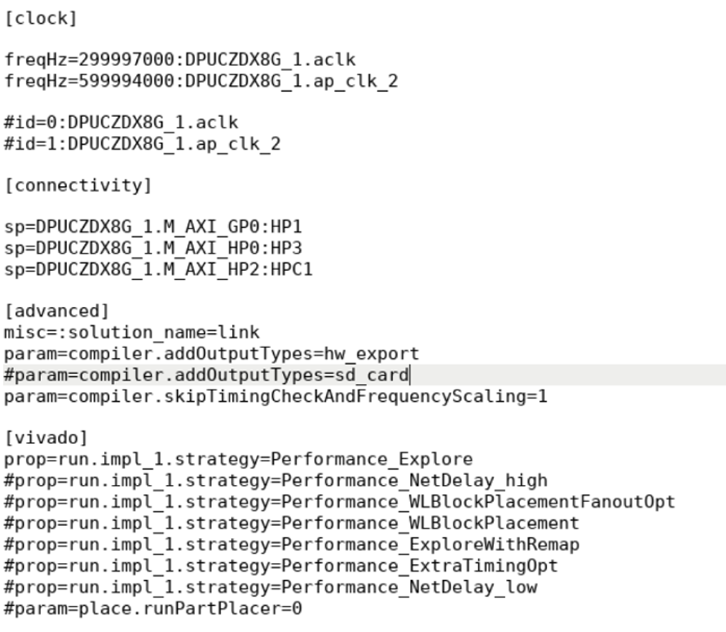
修改prj_config_1dpu文件为
运行以下命令来生成xclbin文件。

此步骤将由加速功能组成的overlay集成到 Vitis platform中。 overlay是 PL 加速器内核,由 Vitis 编译器 (v++) 编译为 Xilinx 对象形式 (.XO) 文件,并由 Vitis 链接器 (v++ --link) 集成到 Vitis 平台中。 Vitis 链接器生成新的设备映像(bit文件)以及包含有关 PL 内核的信息的设备可执行文件 (XCLBIN)。Vitis 打包程序 (v++ --package) 打包设备二进制文件以及其他所需的文件,以构建可运行软件。
等待vitis运行完,我们就将DPU集成到了platform上。





