本文转载自:FPGA开源工作室
1. DDS IP概述
直接数字合成器(DDS)或数控振荡器(NCO)是许多数字通信系统中的重要部件。正交合成器用于构造数字下变频器和上变频器、解调器,并实现各种类型的调制方案,包括PSK(相移键控)、FSK(频移键控(frequency shift keying))和MSK(minimum shift keyed)。数字生成复数或实数正弦曲线采用查找表方案。查找表存储正弦曲线的样本。数字积分器用于生成合适的相位自变量,该相位自变量由查找表映射到期望的输出波形。简单的用户界面接受系统级参数,例如所需的输出频率和所生成波形的杂散抑制。
•相位生成器和SIN/COS查找表可以单独生成,也可以与可选抖动一起生成,以提供完整的DDS解决方案。
•光栅化功能消除了相位截断产生的相位噪声。
•正弦、余弦或正交输出。
•可选的累积相位的每通道重新同步。
•查找表可以存储在分布式或块RAM中。
•可选相位抖动扩展谱线能量,以获得更大的杂散自由动态范围(SFDR)。
•相位抖动或泰勒级数校正选项使用最少的FPGA资源提供高动态范围信号。支持18dB到150dB的SFDR。
•多达16个独立的时分复用信道。
•使用高达48位相位累加器的精细频率分辨率,带有DSP切片或FPAGA逻辑选项。
•3位至26位带符号输出采样精度
IP 文档连接:PG141
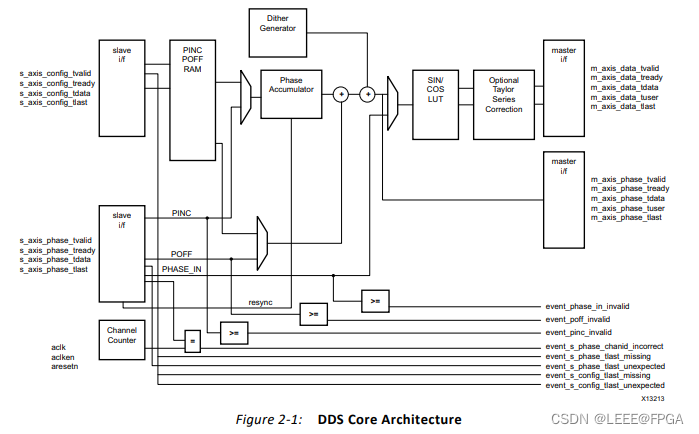
2. DDS IP 架构

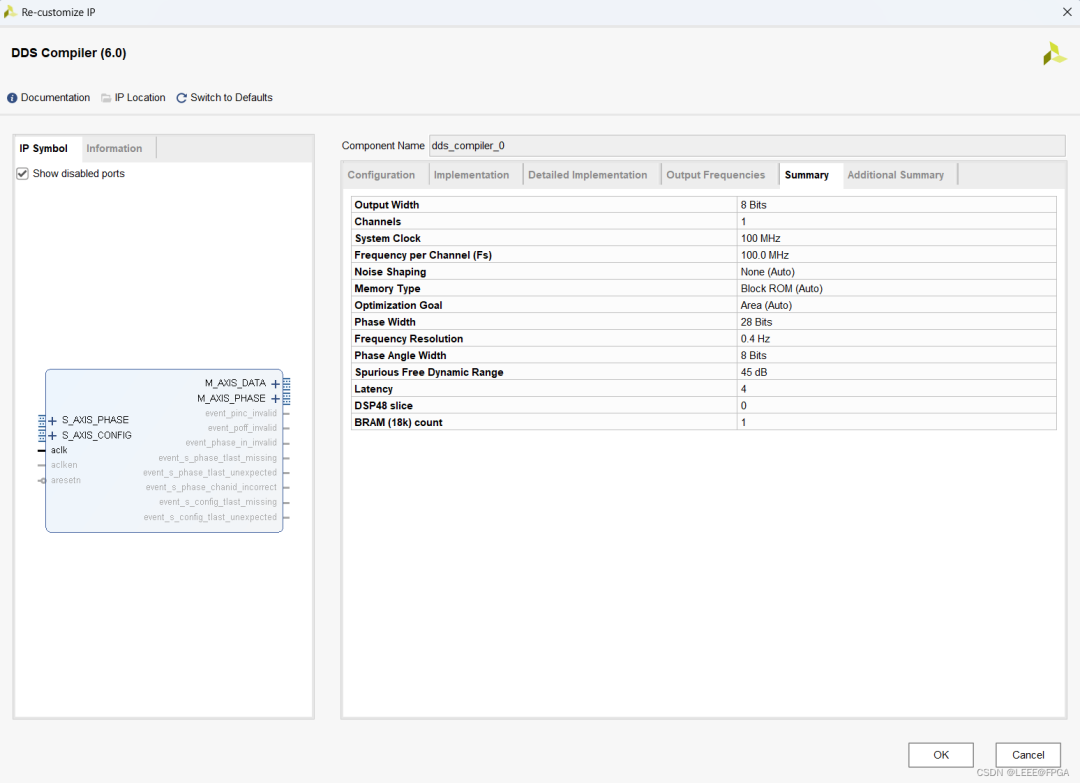
3. DDS IP 配置
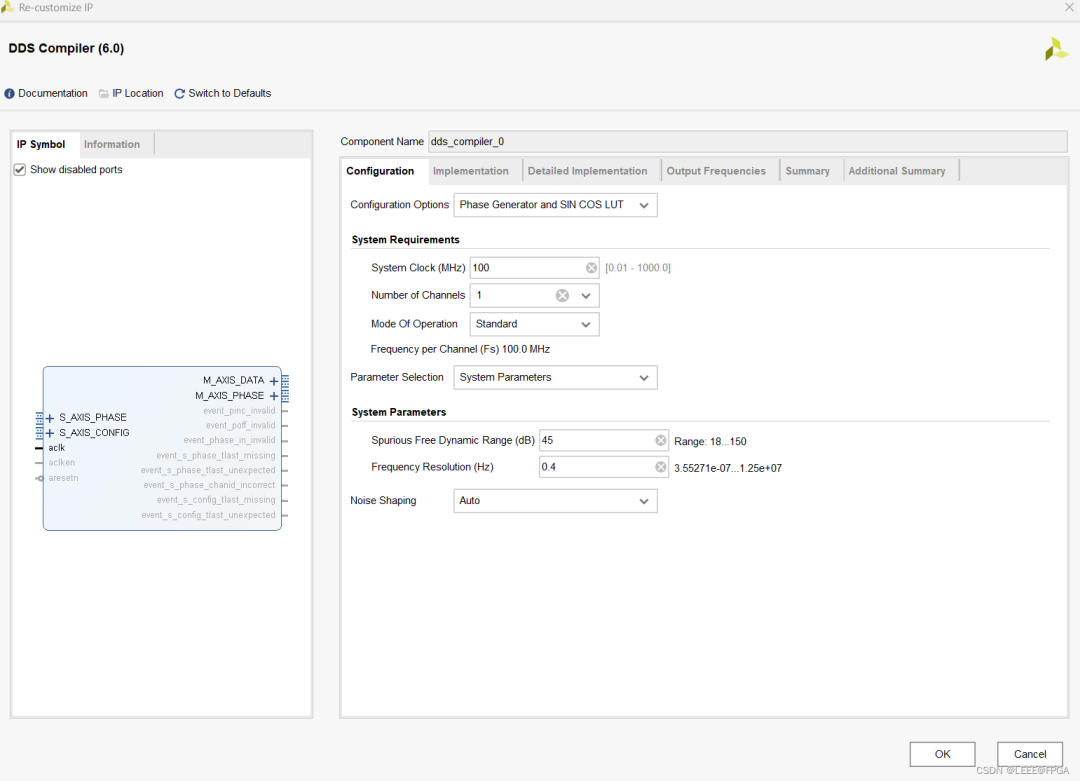
(1)Component Name 可以修改IP核名字
(2)Configuration options 配置选项:这里我们选择phase generator and sin cos LUT
(3)system clock(系统时钟) 100MHz(范围0.01—1000MHZ);通过奈奎斯特定理可知,最大输出的频率为50MHz,实际测得输出最大频率为50MHz,当输出的频率超过25MHz的时候频率就开始不稳定;要想输出更大的频率,可以通过增加系统时钟来实现;
(4)Number of channels(通道数选择) 1;最多可以选择16个通道输出,本项目为实现任意可调频率输出只用到单通道输出即可;
(5)Frequency per channel (每通道频率)100MHz;通过系统时钟除以通道数得到每通道的频率;
(6)Parameter selection (参数选择) system parameters;系统参数,为了更精确的输出任意频率,选择系统参数模式;
(7)Spurious free dynamic range(伪动态自由范围)48(决定输出正余弦数据位宽n,范围为6*(n-1)~6*n,后面选择正弦或者余弦输出时位宽为8位,如果正余弦同时输出则位宽为16位,正弦为高8位,余弦为低8位)
(9)Frequency resolution(频率分辨率) 0.02910383045673370361328125(决定相位位宽,由相位位宽函数可得出频率分辨率,分辨率越精确,可调输出频率越精确,相位位宽函数在后面讲到)
(10)Noise shaping(噪声整形):控制是否相位截断、抖动或泰勒级数校正使用;
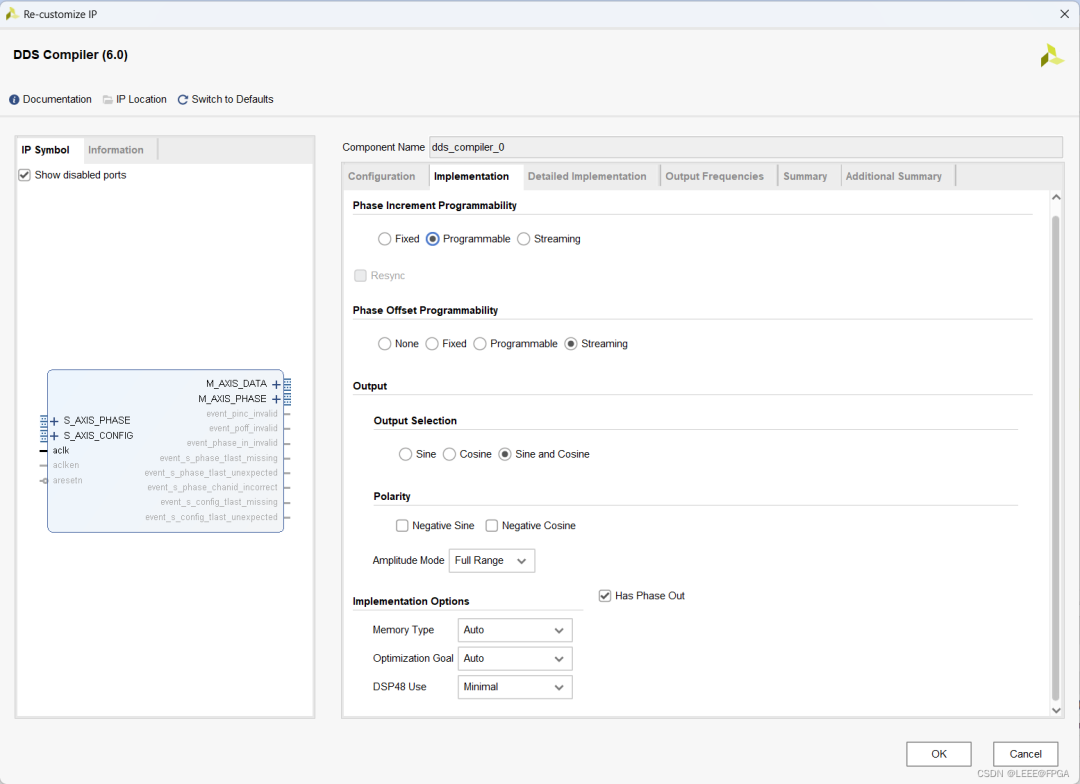
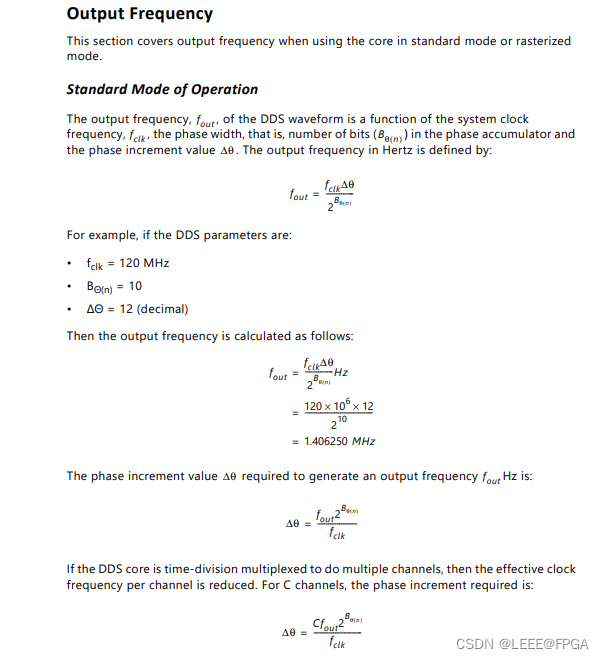
1)Phase increment programmability(相位增量可编程性)
Fixed(固定模式);固定输出频率,不可任意调整;
Programmable(可编程模式);根据设计需求选择相位增量可编程模式,通过频率输出函数可知,输入不同相位增量时可输出不同频率,频率输出函数后面讲到;
Streaming(流水模式);
(2)Phase offset programmability
None(无);选择无相位偏移;
Fixed(固定模式);固定相位偏移;
Programmable(可编程模式);可以调整波形相位;
Streaming(流水模式);
(3)Output selection(输出选择)
Sine and cosine(正弦和余弦);如果用到正弦和余弦同时输出,则高8位表示正弦输出,低8位表示余弦输出;
Sine(正弦);选择正弦输出即可;
Cosine (余弦);
(4)Polarity (极性)没用上,不用选;
Negative sine(负极性正弦);
Negative cosine(负极性余弦);
(5)Implementation options(实现选项)
Memory type(内存类型:它控制SIN/COS查找表的实现):auto默认选择自动、distribution rom(分布rom)、block rom(块rom)
Optimization goal(优化目标:选择控制实现决策的目标是最高速度还是最低资源):auto默认选择自动、area(区域)、speed(速度)
DSP48 use(控制相位累加器和后续添加阶段(相位偏移或抖动噪声添加)的实现):minimal(默认最小)、maximal(最大)
4. FPGA 实验
调用DDS IP核实现扫频信号,我这里设计的扫频范围是1KHz–10KHz,通过控制频率控制字来更改输出的波形的频率,让其在1KHz到10KHz直接变化,又让其从10KHz变化到1KHz。
DDS_top:
module dds_top(
input wire aclk,
input wire reset_n,
output valid,
output signed [7:0] sin,
output signed [7:0] cos
);
wire s_axis_phase_tvalid;
wire [31 : 0] s_axis_phase_tdata;
wire s_axis_config_tvalid;
wire [31 : 0] s_axis_config_tdata;
wire m_axis_data_tvalid;
wire [15 : 0] m_axis_data_tdata;//输出为16位,高8位是sin波形,低8位是cos波
wire m_axis_phase_tvalid;
wire [31 : 0] m_axis_phase_tdata;
assign valid = m_axis_data_tvalid;
assign sin =m_axis_data_tdata[15:8];
assign cos =m_axis_data_tdata[7:0];
dds_ctl Udds_ctl(
.aclk(aclk),//100mhz
.reset_n(reset_n),
.phase_tvalid(s_axis_phase_tvalid),
.phase_tdata(s_axis_phase_tdata),
.config_tvalid(s_axis_config_tvalid),
.config_tdata(s_axis_config_tdata)
);
dds_compiler_0 UDDS (
.aclk(aclk), // input wire aclk
.s_axis_phase_tvalid(s_axis_phase_tvalid), // input wire s_axis_phase_tvalid
.s_axis_phase_tdata(s_axis_phase_tdata), // input wire [31 : 0] s_axis_phase_tdata
.s_axis_config_tvalid(s_axis_config_tvalid), // input wire s_axis_config_tvalid
.s_axis_config_tdata(s_axis_config_tdata), // input wire [31 : 0] s_axis_config_tdata
.m_axis_data_tvalid(m_axis_data_tvalid), // output wire m_axis_data_tvalid
.m_axis_data_tdata(m_axis_data_tdata), // output wire [15 : 0] m_axis_data_tdata
.m_axis_phase_tvalid(m_axis_phase_tvalid), // output wire m_axis_phase_tvalid
.m_axis_phase_tdata(m_axis_phase_tdata) // output wire [31 : 0] m_axis_phase_tdata
);
endmodule
dds_ctl
//config_tdata -- detla=Fout*2^32/Fclk
module dds_ctl(
input aclk,//100mhz
input reset_n,
output wire phase_tvalid,
output wire [31 : 0] phase_tdata,
output wire config_tvalid,
output wire [31 : 0] config_tdata
);
//参数定义
parameter F_word_1KHz = 32'hA7C5 ;//1KHz频率控制字 M = 1_000*2^32/100_000_000
parameter F_word_10KHz = 32'h68DB8 ;//10KHz频率控制字 M = 10_000*2^32/100_000_000
parameter F_word_change = 32'h1 ;//1KHz-10KHz变化精度
//信号定义
reg [31:0] config_data_reg ;//频率控制字寄存器
reg max_flag ;//当频率控制字最大时,拉高
//max_flag
always @(posedge aclk or negedge reset_n)begin
if(!reset_n)begin
max_flag <= 1'b0;
end
else if(config_data_reg >= F_word_10KHz)begin
max_flag <= 1'b1;
end
else if(config_data_reg == F_word_1KHz)begin
max_flag <= 1'b0;
end
end
//控制频率控制字均匀变化
always @(posedge aclk or negedge reset_n)begin
if(!reset_n)begin
config_data_reg <= F_word_1KHz;
end
else if(max_flag == 1'b1)begin
config_data_reg <= config_data_reg - F_word_change;
end
else begin
config_data_reg <= config_data_reg + F_word_change;
end
end
//输出
assign phase_tvalid = 1'b1;
assign phase_tdata = 32'h0;//设置相位控制字为0
assign config_tvalid = 1'b1;
assign config_tdata = config_data_reg;
endmodule
tb
`timescale 1ns / 1ps
module tb(
);
reg aclk;
reg reset_n;
wire valid;
wire signed [7:0] sin;
wire signed [7:0] cos;
initial begin
aclk =0;
reset_n =0;
#1000;
reset_n =1;
end
always #(5) aclk =~aclk;
dds_top Udds_top(
.aclk(aclk),
.reset_n(reset_n),
.valid(valid),
.sin(sin),
.cos(cos)
);
endmodule
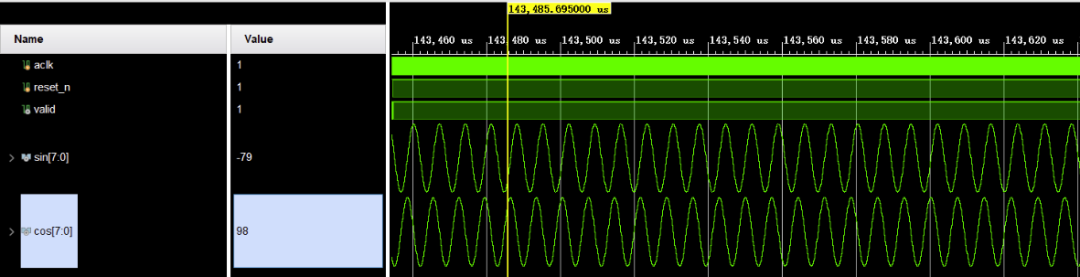
仿真波形: