CANopen是一种架构在控制局域网路(Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定常在嵌入式系统中使用,也是工业控制常用到的一种现场总线。CANopen 实现了OSI模型中的网络层以上(包括网络层)的协定。CANopen 标准包括寻址方案、数个小的通讯子协定及由设备子协定所定义的应用层。 CANopen 支援网络管理、设备监控及节点间的通讯,其中包括一个简易的传输层,可处理资料的分段传送及其组合。一般而言数据链结层及物理层会用CAN来实作。除了 CANopen 外,也有其他的通讯协定(如EtherCAT)实作 CANopen 的设备子协定。CANopen由非营利组织CiA(CAN in Automaion)进行标准的起草及审核工作,基本的 CANopen 设备及通讯子协定定义在 CAN in Automation (CiA) draft standard 301中。针对个别设备的子协定以 CiA 301 为基础再进行扩充。如针对 I/O 模组的 CiA401 及针对运动控制的 CiA402。
本说明是CAN上层协议CANOpen协议的嵌入式简化,较原始CANOpen版本简单易用,且更适应嵌入式模块通讯的需要,并且兼容CANOpen协议。
下面按照协议支持的功能分别进行说明:
NMT网络管理服务
网络管理状态表:
终端主节点→从节点
|
COB-ID |
0-字节 |
1-字节 |
|
0 |
命令说明符 |
节点ID |
|
(16#000) |
(CS) |
(1) |
说明:一般终端主节点是指上位机,如上位用于网络管理和监控的PC机,从节点是指被管理的各模块。
如果节点ID是0表示命令会被广播至所有从节点,从节点必须执行相应的命令。
命令说明符功能见下表:
|
命令说明符(CS) |
意义 |
|
1(16#01) |
启动节点进入可操作状态 |
|
2(16#02) |
停止远程节点 |
|
128(16#80) |
使节点进入预操作状态 |
|
129(16#81) |
复位节点 |
|
130(16#82) |
复位通讯 |
例:启动节点1进入可操作状态,
|
16#000 |
16#80 |
16#04 |
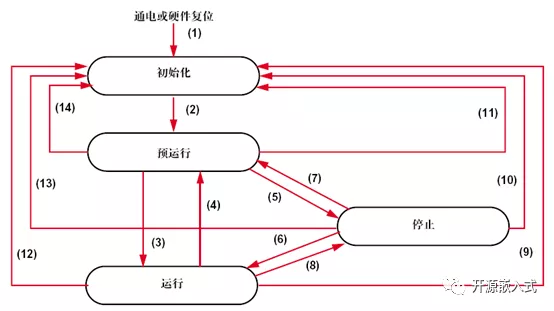
网络管理状态表:
|
状态转换 |
说明 |
|
(1) |
通电后自动初始化 |
|
(2) |
完成初始化自动进入预操作状态 |
|
(3),(6) |
启动远程节点 |
|
(4),(7) |
进入预操作状态 |
|
(5)(8) |
停止远程节点 |
|
(9),(10),(11) |
复位节点 |
|
(12),(13),(14) |
复位通讯 |
根据节点的状态提供以下服务:
|
初始化 |
预操作 |
可操作 |
停机 |
|
|
PDO |
√ |
|||
|
SDO |
√ |
√ |
||
|
启动引导 |
√ |
√ |
||
|
网络管理 |
√ |
√ |
√ |
|
|
错误控制 |
√ |
√ |
过程数据对象(PDO)服务
过程数据对象用于在节点之间传送过程数据,如I/O模块I/O状态读取和设定,模拟量采集和模拟量输出等等,本协议考虑从机硬件限制最多支持4组PDO,每组包含一个RPDO和一个TPDO,现已I/O模块为例进行说明:
设I/O模块有24输入,24输出,24输入通过TPDO传给监控终端或其他节点,24输出通过RPDO由控制节点对其进行设定,采用发送和接收PDO1组,即标识符TPDO:0x180+NODE_ID,RPDO:0x200+NODE_ID,用3个字节就可以表示24个I/O量,因此发送和接收PDO可以表示如下(假设NODE_ID=1):
|
COB-ID |
0字节 |
1字节 |
2字节 |
|
385(0x181) |
Data:输入I/O状态量 |
||
|
Input_Digital_1 |
Input_Digital_2 |
Input_Digital_3 |
|
|
COB-ID |
0字节 |
1字节 |
2字节 |
|
513(0x201) |
Data:输出I/O状态量 |
||
|
Output_Digital_1 |
Output_Digital_2 |
Output_Digital_3 |
|
如果是8通道的模拟量采集模块则需要两个TPDO来传送采集的数据,不需要RPDO,因为每个通道产生一个16位数据,一共是16字节,每个TPDO只能够传送8字节。两个TPDO标识符分别为:0x180+NODE_ID,0x280+NODE_ID。
每帧数据格式如下表(设NODE_ID=2):
TPDO1
|
COB-ID |
0-1字节 |
2-3字节 |
4-5字节 |
6-7字节 |
|
385(0x182) |
Data:输入模拟量 |
|||
|
Output_Anolog_1 |
Output_Anolog_2 |
Output_Anolog_3 |
Output_Anolog_4 |
|
TPDO2
|
COB-ID |
0-1字节 |
2-3字节 |
4-5字节 |
6-7字节 |
|
385(0x182) |
Data:输入模拟量 |
|||
|
Output_Anolog_5 |
Output_Anolog_6 |
Output_Anolog_7 |
Output_Anolog_8 |
|
1. I/O节点←监控终端(RPDO)
2. I/O节点→监控终端(TPDO)
服务数据对象(SDO)服务
服务数据对象用于读写节点的对象字典,现 只实现SDO下载和上传的全速模式,不支持正常模式也不支持块下载和上传,因为数据量不大,实现的功能足够用,SDO全速下载和上传采用应答式服务,由监控终端向节点发送服务请求,由节点返回应答。
现假设某节点NODE_ID=3,协议报文如下:
读节点OD
假设,读SDO index = 0x1018 subindex = 0x00,返回的是1字节data=0x04
监控终端→节点(终端请求)
|
COB-ID |
0字节 |
1字节 |
2字节 |
3字节 |
4字节 |
5字节 |
6字节 |
7字节 |
|
1539(0x603) |
命令 |
index |
subindex |
Reserved(保留) |
||||
|
0x40 |
0x18 |
0x10 |
0x00 |
0x00 |
0x00 |
0x00 |
0x00 |
|
监控终端←节点(节点应答)
|
COB-ID |
0字节 |
1字节 |
2字节 |
3字节 |
4字节 |
5字节 |
6字节 |
7字节 |
|
1411(0x583) |
命令 |
index |
subindex |
数据 |
凑够8个字节 |
|||
|
0x4F |
0x18 |
0x10 |
0x00 |
0x04 |
0x00 |
0x00 |
0x00 |
|
写节点OD
假设,写SDO index=0x1017,subindex=0x00,写数据为0x07D0
监控终端→节点(终端请求)
|
COB-ID |
0字节 |
1字节 |
2字节 |
3字节 |
4字节 |
5字节 |
6字节 |
7字节 |
|
1539(0x603) |
命令 |
index |
subindex |
要写入的数据 |
凑8个字节 |
|||
|
0x2B |
0x17 |
0x10 |
0x00 |
0xD0 |
0x07 |
0x00 |
0x00 |
|
监控终端←节点(节点应答)
|
COB-ID |
0字节 |
1字节 |
2字节 |
3字节 |
4字节 |
5字节 |
6字节 |
7字节 |
|
1411(0x583) |
命令 |
index |
subindex |
凑够8个字节 |
||||
|
0x60 |
0x18 |
0x10 |
0x00 |
0x00 |
0x00 |
0x00 |
0x00 |
|
如果监控终端发送的请求,节点处理出错,将返回SDO中止报文,报文如下:
|
COB-ID |
0字节 |
1字节 |
2字节 |
3字节 |
4字节 |
5字节 |
6字节 |
7字节 |
|
1411(0x583) |
命令 |
index |
subindex |
错误代码 |
||||
|
0x80 |
0x18 |
0x10 |
0x00 |
0-7位 |
8-15位 |
16-23位 |
24-31位 |
|
节点返回的错误代码如下:
SDO_ABORT_UNSUPPORTED 0x06010000UL 不支持该功能
SDO_ABORT_NOT_EXISTS 0x06020000UL 不存在的索引
SDO_ABORT_READONLY 0x06010002UL 只读,不可写
SDO_ABORT_TYPEMISMATCH 0x06070010UL 类型不匹配
SDO_ABORT_UNKNOWN_COMMAND 0x05040001UL 未知命令
SDO_ABORT_UNKNOWNSUB 0x06090011UL 未知子索引
注:命令字节含义请参考CANOpen协议文件DS301。
错误控制——心跳(或者叫脉动)协议(heatbeat)
错误控制用于了解总线上各节点的状态,本文只实现心跳协议,由各节点向监控终端定期发送心跳报文,报告本节点的状态,报文如下:
设节点NODE_ID=2
节点→监控终端
|
COB-ID |
0字节 |
|
1794(0x702) |
节点状态 |
|
0x00 |
返回状态如下:
|
状态代码 |
状态含义 |
|
0x00 |
BOOTUP启动状态 |
|
0x04 |
STOPPED停止 |
|
0x05 |
OPERATIONAL可操作 |
|
0x7F |
PRE-OPERATIONAL预操作 |
节点在启动之后发出BOOTUP心跳,然后按固定频率发出脉动消息帧,监控终端接收该报文用以检测该节点状态。
本文转载自: 开源嵌入式