本篇文章目的是使用Block Memory进行PS和PL的数据交互或者数据共享,通过zynq PS端的Master GP0端口向BRAM写数据,然后再通过PS端的Mater GP1把数据读出来,将结果打印输出到串口终端显示。
涉及到AXI BRAM Controller 和 Block Memery Generator等IP的使用。
本系列文章尽可能的让每一个实验都相对独立,过程尽可能保证完整性,保证实验的可重现性。 但是用到的模块或者IP的具体作用和用法不保证都重复详细的介绍。
12.1 搭建硬件工程
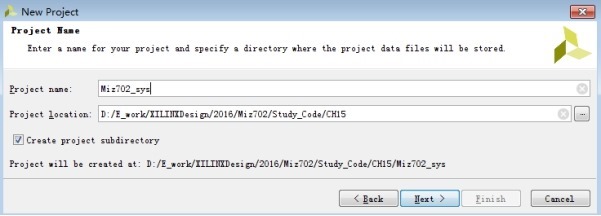
Step1:新建一个名为为Miz702_sys的工程
Step2:选择RTL Project 勾选Do not specify source at this time

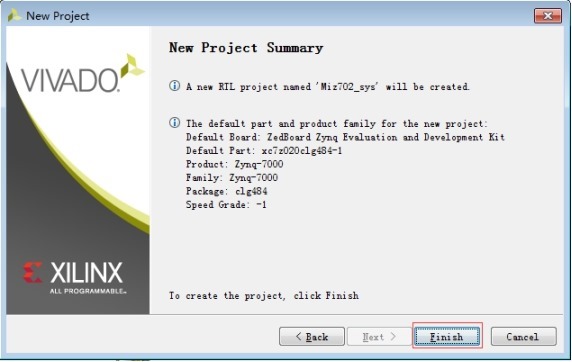
Step3:由于Miz702兼容zedboard 因此选择zedboard开发包

Step4:单击Finish
12.2使用IP Integrator创建硬件系统
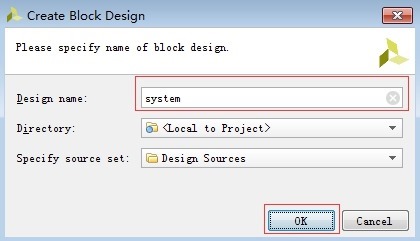
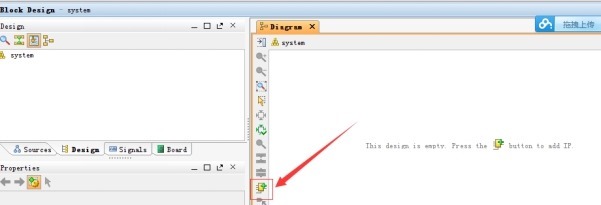
Step1:单击Create Block Design
Step2:输入system
Step3:单击下图中 添加IP按钮
添加IP按钮
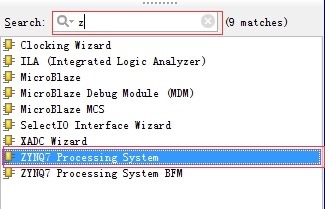
Step4:搜素单词z选择ZYNQ7 Processing System,然后双击
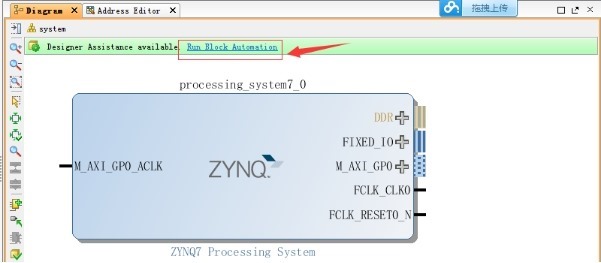
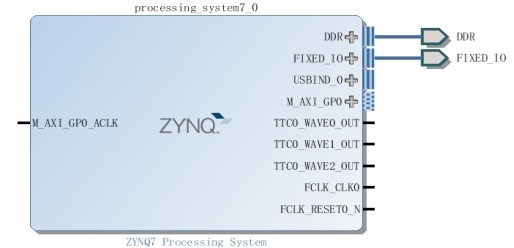
Step5:添加进来了ZYNQ CPU IP,然后单击Run Block Automation
Step6:直接单击OK
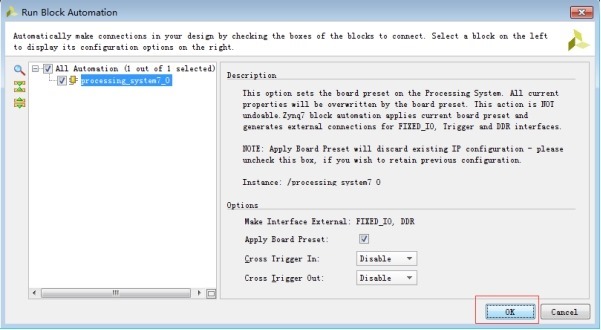
Step7:在你点击了OK后,你会发现DDR以及FICED_IO自劢的延伸出来。
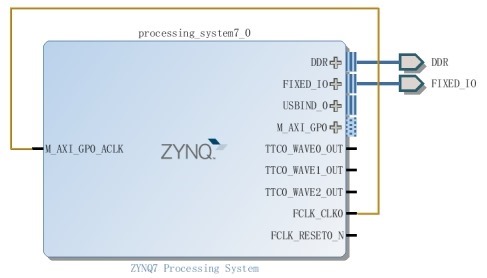
tep8:连线的作用就是把PS的时钟可以接入PL部分,当然这里我们暂时用不到PL部分的资源。在Block文件中,我们迚行连线,将鼠标放在引脚处,鼠标变成铅笔后迚行拖拽,连线如下图所示:
Step9:双击 ZYNQ,打开Re-customize IP对话框,在PL-PS Configuration下,选中 GP0和GP1然后 点击ok

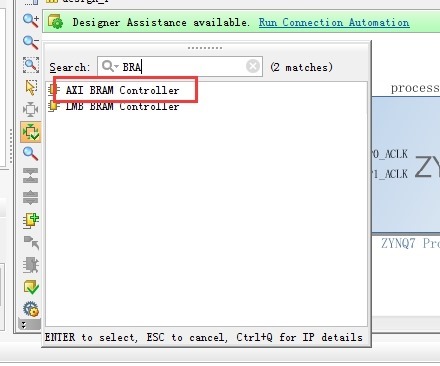
Step10:点击,Add IP,连续添加两个 AXI BRAM Controller
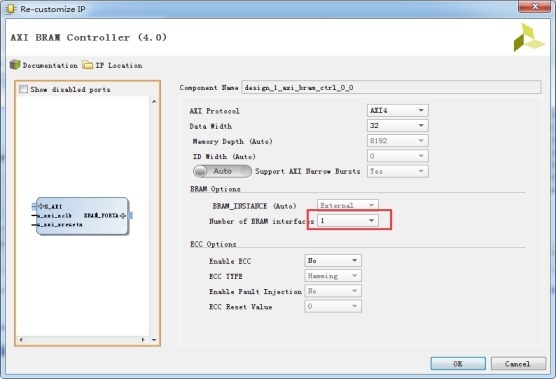
Step11:分别双击AXI BRAM Controller模块,把number of BRAM interfaces 全部修改成1
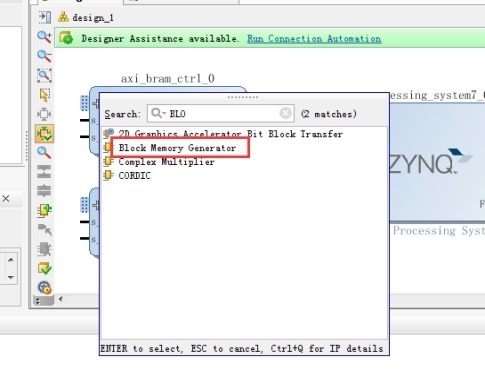
Step12:点击ADD IP,添加Block Memory Generator
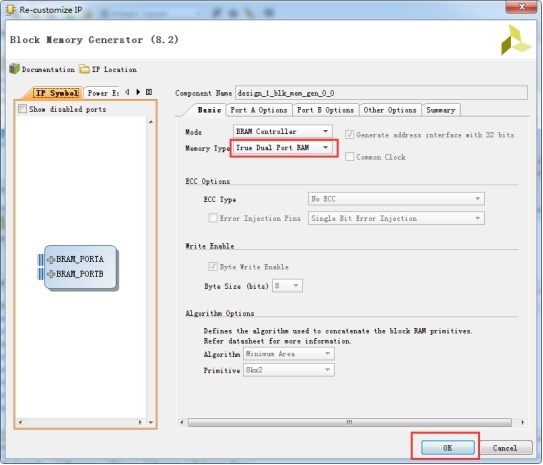
Step13:双击Block Memory Generator ,修改Memory Type。
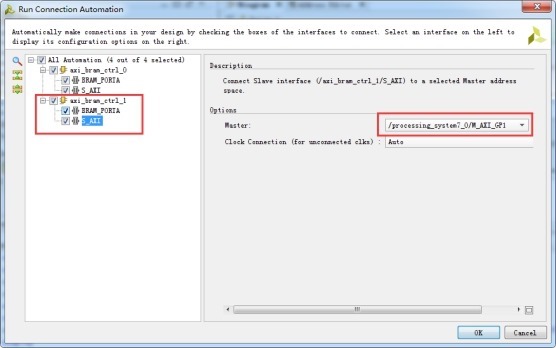
Step14:点击run Connection Automation,把axi_bram_ctrl_1的S_AXI端口的连接目标修改为如图所示:
Step15:点击重新布局,生成好的硬件框架如下

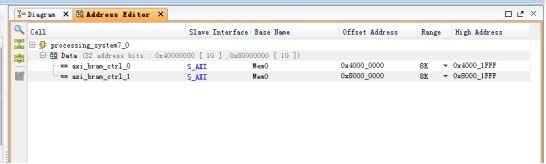
Step16:点击Address Editor 可以看到系统已经为我们自动分配好了正确的地址
Step17: 右击 system.bd, 单击Generate Output Products
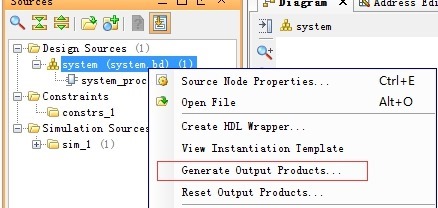
Step18:支部操作会产生执行、仿真、综合的文件

Step19:右击system.bd 选择 Create HDL Wrapper 这步的作用是产生顶层的HDL文件
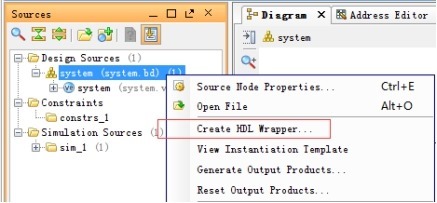
Step20:选择Leave Let Vivado manager wrapper and auto-update 然后单击OK
Step21:执行->产生bit文件
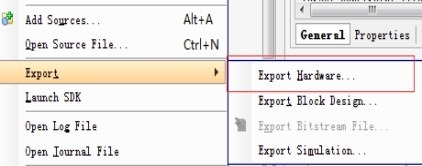
12.3导出SOC硬件到SDK
Step1:File->Export->Export Hardware
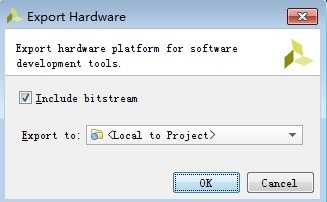
Step2:勾选Include bitstream 直接单击OK
Step3:File->Launch SDK加载到SDK

Step4:单击OK

12.4 软件工程
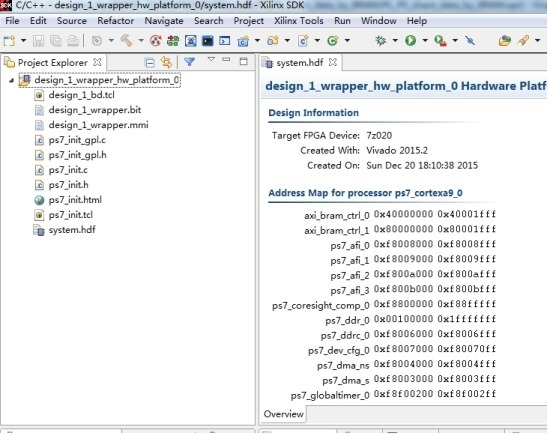
Step1:打开的SDK界面如下,这里的信息是和硬件相关的,例如在Address Map 这一栏下可以看到axi_bram_ctrl_0和刚刚在vavado Address Editor下的地址是一致的
Step2: 新建一个名为BRAM_Test的空的工程,并且新建一个main.c文件,添加如下代码。
/*
* mai.c
*
* Created on: 2016年6月26日
* Author: Administrator
*/
#include
#include "xil_io.h" //这个头文件下面包含很重要的IO读写函数
#include "xparameters.h" //这个头文件里把硬件的地址映射等参数都写成了宏定义方便使用
//void print(char *str);
int main()
{
int num;
int rev;
xil_printf("------The test is start...------\n\r");
//XPAR_AXI_BRAM_CTRL_0_S_AXI_BASEADDR是axi_bram_ctrl_0的地址,Xil_Out32通过控制axi_bram_ctrl_0,向blk_mem_gen_0写数据
for( num=0; num<15; num++ )
{
Xil_Out32(XPAR_BRAM_0_BASEADDR + num*4, 0x10000000+num); //
}
//XPAR_AXI_BRAM_CTRL_1_S_AXI_BASEADDR是axi_bram_ctrl_1的地址,Xil_In32 通过控制axi_bram_ctrl_0,把blk_mem_gen_0里的数据读出来
//PS和PL可以在blk_mem_gen_0里共享数据
for( num=0; num<15; num++ )
{
rev = Xil_In32(XPAR_BRAM_0_BASEADDR + num*4);
xil_printf( "The data at %x is %x \n\r",XPAR_BRAM_0_BASEADDR + num*4,rev);
}
xil_printf("------The test is end!------\n\r");
return 0;
}
12.5 测试结果
串口终端打印输出信息如下:
------The test is start...------
The data at 80000000 is 10000000
The data at 80000004 is 10000001
The data at 80000008 is 10000002
The data at 8000000C is 10000003
The data at 80000010 is 10000004
The data at 80000014 is 10000005
The data at 80000018 is 10000006
The data at 8000001C is 10000007
The data at 80000020 is 10000008
The data at 80000024 is 10000009
The data at 80000028 is 1000000A
The data at 8000002C is 1000000B
The data at 80000030 is 1000000C
The data at 80000034 is 1000000D
The data at 80000038 is 1000000E
------The test is end!------
12.6 本章小结
本文通过PS端把数据写入到PL端的BRAM,然后从而又把数据从PL端读到PS端,从而简单的实现了PL和PS的数据交互和共享。